


- 読み込み中
ロボット支援人工膝関節置換術とは
ロボット支援人工膝関節置換術とは、コンピュータが組み込まれた手術支援ロボットが骨の形や膝のまわりの靱帯などの状態を認識し、個々の患者さんの関節に合わせた手術計画(骨の削り方、軟部組織バランスの取り方)をたてて、医師がロボットアームを使用し、その計画に沿って実行する手術です。
正確なインプラント設置、適切な伸展―屈曲ギャップ、至適な靭帯バランスなどが人工膝関節置換術の成功(関節機能、安定性、長期耐用性)には重要であり、医師が術中に確認をしながら手術をします。通常の人工膝関節置換術では、医師がこれらの確認作業を位置合せや案内機構のある器具を用いて実施(jig-based technique)しますが、ロボット支援人工膝関節置換術では、これらの一部または全てを手術支援ロボットが実施します。
ロボット支援人工膝関節置換術で手術支援ロボットが担当する部分は上記のように手術手技の一部であり、関節の展開(切開をして骨・軟骨・靭帯などを露出すること)、インプラントの骨への固定、閉創は医師が実施します。またロボットが担当する部分においても、操作する医師の技量が反映されるため、ロボットを使えば誰でも上手な手術が出来るようになるわけではありません。ロボット支援人工膝関節置換術での「ロボット」の役割は、手術を正確かつ安全に実施できるように医師を支援することです。
Patient Useful Info Links (English)
Robotic-Assisted Total Knee Replacement(ロボット支援人工膝関節置換術)
https://orthoinfo.aaos.org/en/treatment/robotic-assisted-joint-replacement/
https://www.boa.ac.uk/asset/AE63A01A-EAF4-4A32-83F1378C70BA63FC/
ロボット支援人工膝関節置換術の適応
ロボット支援人工膝関節置換術の適応となる対象疾患は、原則として、従来の人工膝関節置換術と同じです。
以下のような主な疾患(病気)が適応となります。
- 変形性膝関節症
- 特発性膝骨壊死
- リウマチ膝
ただし靭帯バランスや伸展機構に問題のある内側支持機構不全膝、膝蓋骨脱臼膝、高度内外反膝では、高度な手術技術を要し、特殊なインプラントを使用することもあるため、ロボット支援人工膝関節置換術が適応とならないことがあります。
手術方法
ロボット支援人工膝関節置換術の手術の進み方は、手術支援ロボットを使用する以外は、従来の人工膝関節置換術と大きな違いはありません。
- 膝前面に10~15㎝の縦の皮膚切開を加えます。
- 筋肉と腱の一部を切開し膝蓋骨を脱臼させることにより膝関節を展開します。
- ロボットが関節の動きを自動追従できるように、光学トラッカー(赤外線光を反射し空間位置を捉える装置)を大腿骨と脛骨にピンで固定します。
- 膝関節の解剖学的ランドマークを確認し、骨形状と下肢アライメントを登録します。
- 画面上に表示される数値をみながら骨切り量や骨切り角度を設定します(手術計画)。
- 手術支援ロボットを用いて関節面を骨切りし形成します。
- 仮の人工関節(トライアルインプラント)を設置し下肢アライメントと軟部組織バランスを画面上に表示される数値でも確認し、必要に応じて修正を加えます。
- 人工関節は骨セメントを使用し強固に骨に固定します(標準的方法)。骨セメントを使用しない特殊な表面加工をした人工関節もあります。
手術支援ロボット(VELYS™ ロボット支援ソリューション)
当院には、人工関節用手術支援ロボットとして、VELYS™ ロボット支援ソリューション(VELYS™ RAS)が導入されています。

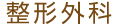
VELYS™ ロボット支援ソリューション(VELYS™ RAS)
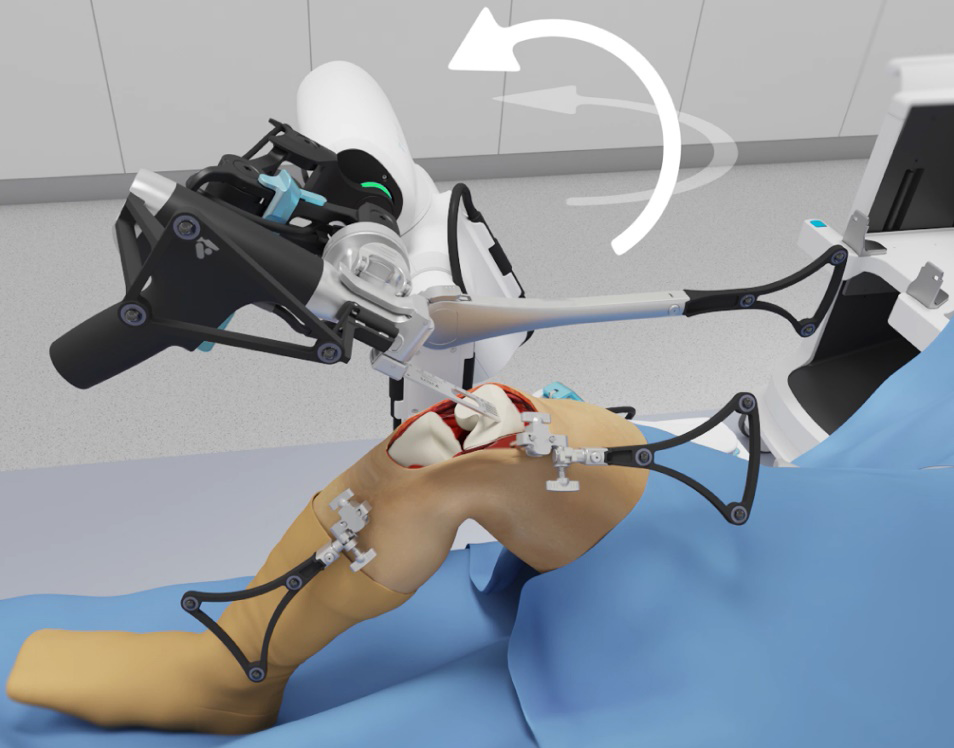
手術模式風景(ロボティックアームと右膝例)
VELYS™ RASは、赤外線カメラによって脚の動きを捉え、肢位に合わせてロボットが自動追従をすることで正確な骨切りを実現します。ロボット、カメラ、モニターで構成されており、ロボット部には、骨切りを行うためのハンドピースが装着されています。全自動で手術を行うのではなく、医師の手術操作を安全に正確に制御するのがVELYS™ RASの役割です。膝関節の軟部組織バランスの評価と仮想の術後予測をすることが可能で、骨切りの精度は、0.33 ± 0.25 mm、0.36 ± 0.61°と正確で精密な手術の実現が可能です。膝の状態を画面上に可視化することが出来るため、情報をもとに医師が手術計画を確認、調整の上、骨切りを行います。
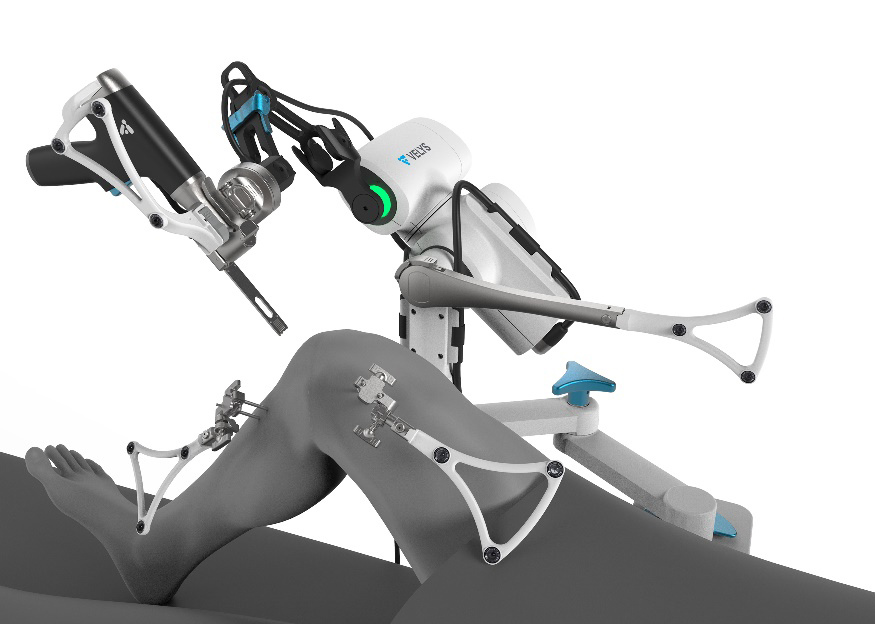
骨切り前の下肢アライメントと軟部組織バランス評価
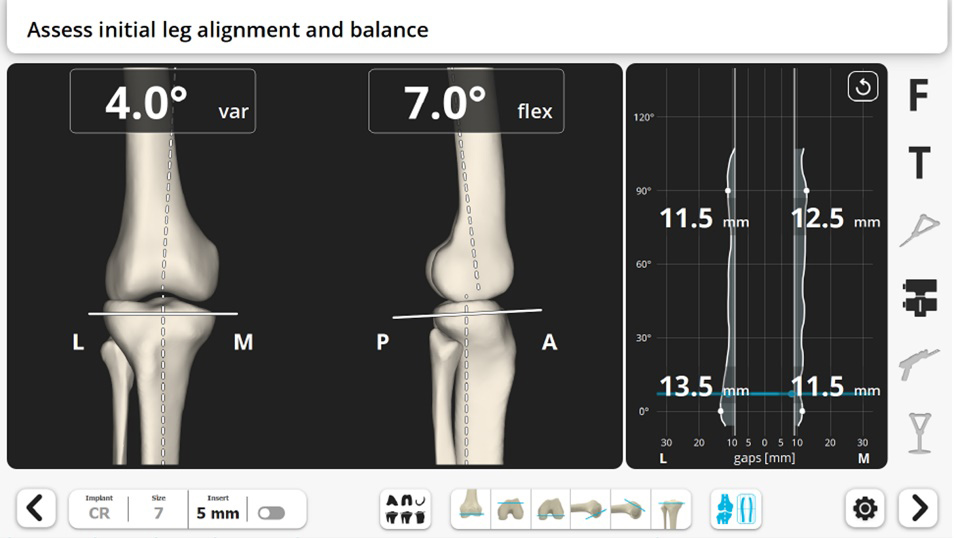
骨切り前の手術計画
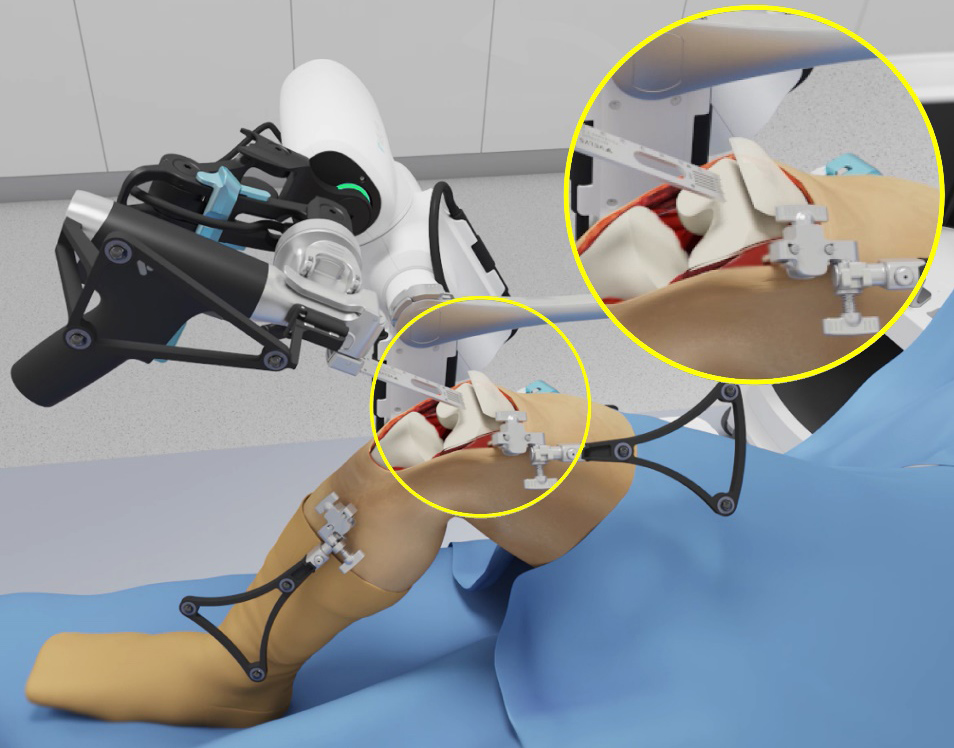
ロボットによる骨切り(ロボットアームと右膝模擬骨)
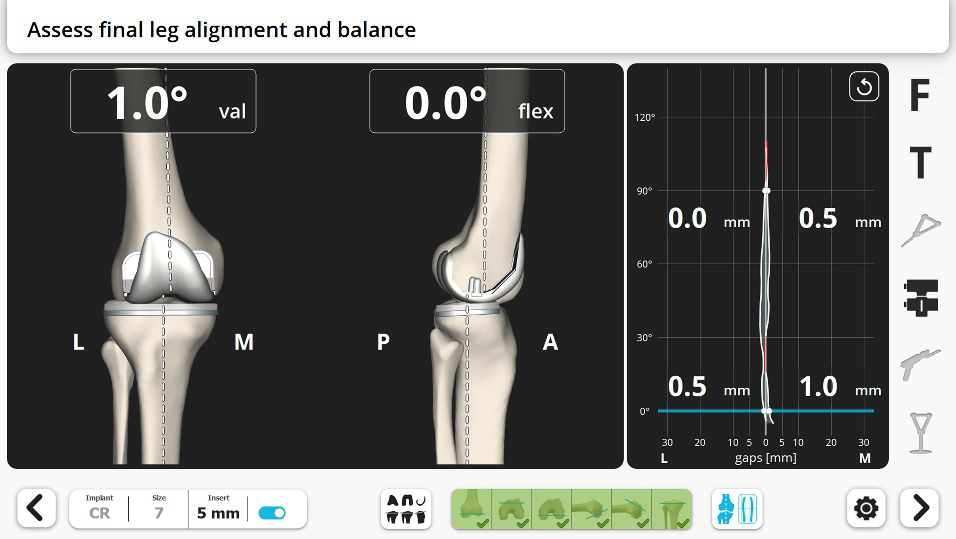
術中トライアル(仮の人工関節)による下肢アライメントと軟部組織バランスの確認
VELYS™ RASには以下のような革新的技術が応用されています。これらの技術により、手術をする医師の自然な手術感覚を損なわずに手術が実施できます。
- 高速視認性能の赤外線カメラによってリアルタイムに脚の動きを捉え、肢位にあわせてロボットが追従して手術を支援(ADAPTIVE TRACKING™ Technology)
- 従来のようなハンドソーの操作性を残しつつ、正確な骨切除面をロボットが制御(NATURAL CONTROL™ Technology)
- 骨切除前に膝の全可動域における連続したバランスデータを軟部組織の安定性グラフで確認(ACCUBALANCE™ Graph)
- 1つの画面上で、連動する仮想のアライメントとギャップバランスを見ながらパラメータを調整(PROADJUST™ Planning)
*「ロボット」とは
- 日本産業規格(JIS:旧日本工業規格)のJIS B0134はロボット(対応英語:robot)を「二つ以上の軸についてプログラムによって動作し、ある程度の自律性をもち、環境内で動作して所期の作業を実行する運動機構」と定義しています。
- 「NEDOロボット白書2014」(国立研究開発法人新エネルギー・産業技術総合開発機構)では、ロボットを「センサー、知能・制御系、駆動系の3つの要素技術を有する、知能化した機械システム」と定義しています。